

Machina Expansionis Horizontalis Sex Tuborum
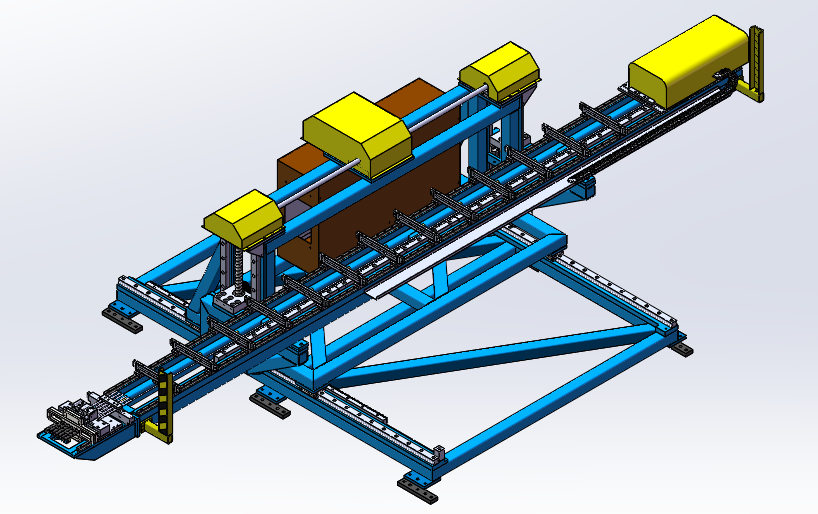
Systema prehensionis
1. Magnitudo machinae: 8500mm * 3800mm * 1400mm
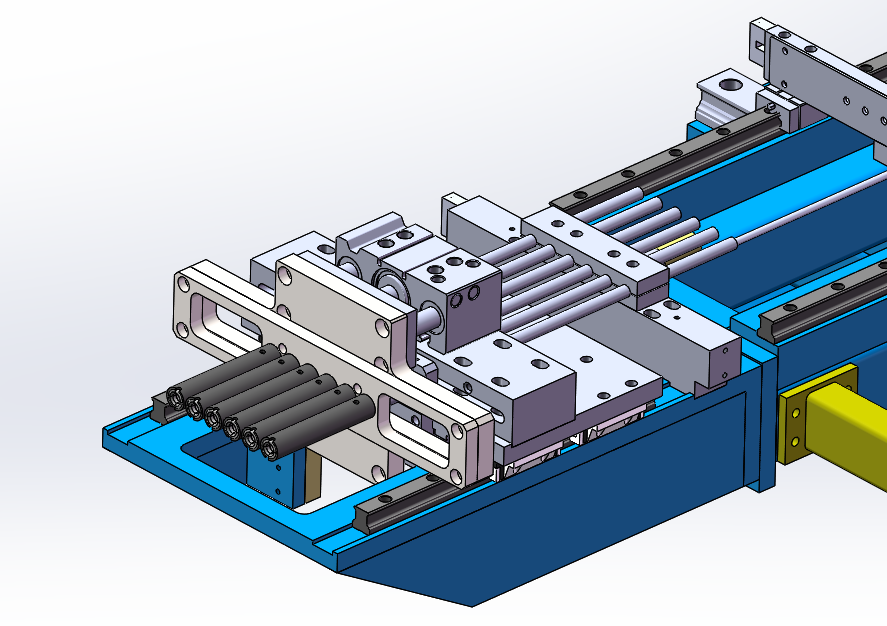
Mechanismus ductorius vectis expansionis
2. Systema prehensionis pneumaticae
Mechanismus impulsoris expansionis
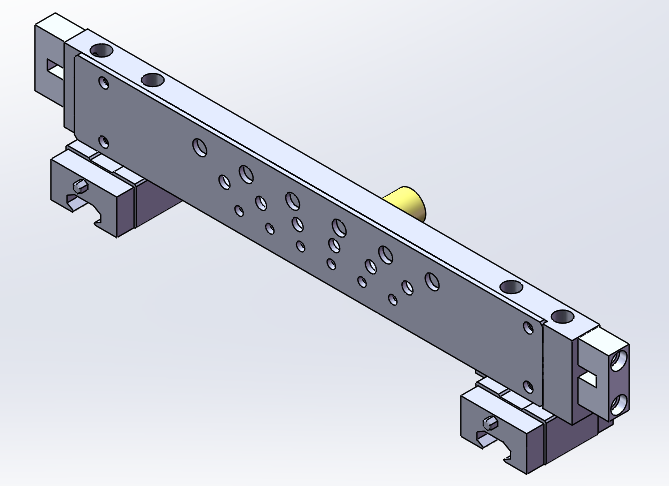
3. Tria genera foraminum rectorum cum diversa distantia inter centros in lamina rectora disposita sunt ad faciliorem substitutionem specificationum.
4. Motor servo agit cremaglieram et rotas dentatas ut vectem expansionis antrorsum et retrorsum agat.
5. Elevatio machinae rota cochleari elevata impellitur et systemate servo regitur. Tubos multi-expansivos cum cursu elevationis maximo 400 mm efficere potest.
6. Machina in lamina ductoria posita est et horizontaliter moveri potest cum spatio motus 2700 mm.
7. Instrumentum duos modos operationis praebet: modum manualem et modum semi-automaticum.
(1) Modus manualis: Quisque gradus est operatio manualis.
(2) Modus semi-automaticus: operatio plene automatica processus expansionis tubi, puga operationis manualis fistulae ordinationis, translatio transversalis et elevatio secundum distantiam statutam.
8. Expansor hydraulicus vel expansor terebralis manualis: ostium tubi cuprei dilatando antequam tubum dilatetur ad expansionem tubi praeparandam.
9. Propter variam contractionis celeritatem tubi U-formis, post expansionem tubos longos et breves efficiet, ita machina tubum U-formem expandere non potest.
10. Instrumentum per tactum velum operatur et per PLC regitur.
Machina Expansionis Horizontalis 6 Tuborum; machina expansionis horizontalis; machina preli pinnarum aluminii; expansor horizontalis; machina expansionis tuborum; machina expansionis; expansor tuborum cuprei; expansor sine contractione; expansor 2 tuborum; machina expansionis sine contractione; machina expansionis OMS
Ictus validus tubi expandentis: 400-4000mm
Diametros Tubi: 3/8" et 1/2"
Magnitudo tubi levis: φ3/8" x 21.65 + 1/2" x 31.75
Numerus Tuborum: 8 tubi
Celeritas tubi expandentis: 13M/min (celeritas magna) 13m/min (reditus)
Potentia motoris: 2-5 kW, 380 V, 50 Hz
| No | Res | Nota |
| 1 | PLC (Programmata Computatralis) | Renault Vel Satis (Japan) |
| 2 | Systema servorum | Mitsubishi (Iaponia) vel Estun |
| 3 | Tactus Tegumentum | Weinview |
| 4 | Cylindrus et valvula solenoidis | Adeko (Taiwan), SMC (Iaponia), CKD (Iaponia) |
| 5 | Interruptor et sensor proximitatis | Omron (Iaponia), Otonix (Corea) |
| 6 | Apparatus Electricus Apertus et Humilis Tensionis | Schneider, Omron, Siemens, Panasonic |
| No | Res | Quantitas | Unitas | Modellum | Marcus |
| 1 | Instrumenta | 1 | constituere | ||
| 2 | globulus | Peces | Sex singulae partes per magnitudinem | Includi in machina | |
| 3 | Vectis Expandens | 10 | Peces | Sex singulae partes per magnitudinem | Includi in machina |
| 4 | Commutator proximitatis | 4 | Peces | ||
| 5 | Globulus | 2 | Peces |





